THEORY OF ROBOTS
- Degrees of Freedom (DOF)
- Robot Workspace
- Mobile Manipulators
- Motion Planning
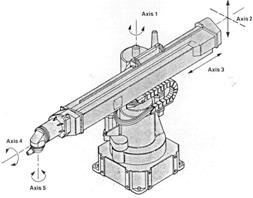
Degrees of Freedom (DOF)
4 DOF Robot Arm, three are out of plane


3 DOF Robot Arm, with a translation joint


5 DOF Robot Arm:

Notice between each DOF there is a linkage of some particular length. Sometimes a joint can have multiple DOF in the same location. An example would be the human shoulder. The shoulder actually has three coincident DOF. If you were to mathematically represent this, you would just say link length = 0.
Also note that a DOF has its limitations, known as the configuration space. Not all joints can swivel 360 degrees! A joint has some max angle restriction. For example, no human joint can rotate more than about 200 degrees. Limitations could be from wire wrapping, actuator capabilities,servo max angle, etc. It is a good idea to label each link length and joint max angle on the FBD.

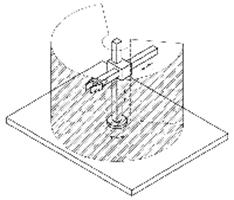
Robot Workspace
The robot workspace (sometimes known as reachable space) is all places that the end effector (gripper) can reach. The workspace is dependent on the DOF angle/translation limitations, the arm link lengths, the angle at which something must be picked up at, etc. The workspace is highly dependent on the robot configuration.
Since there are many possible configurations for your robot arm, from now on we will only talk about the one shown below. I chose this 3 DOF configuration because it is simple, yet isnt limiting in ability.

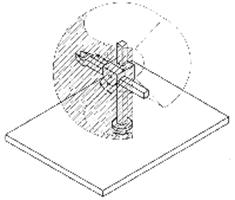
Now lets assume that all joints rotate a maximum of 180 degrees, because most servo motors cannot exceed that amount. To determine the workspace, trace all locations that the end effector can reach as in the image below
.

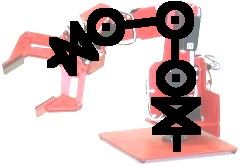
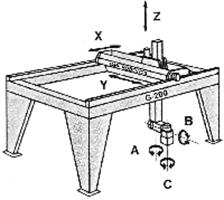
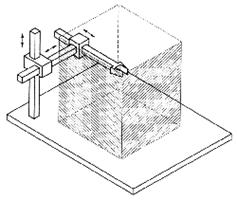
Cartesian Gantry Robot Arm
Cylindrical Robot Arm

Spherical Robot Arm
Scara Robot Arm


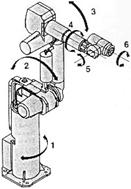
Articulated Robot Arm

Mobile Manipulators
A moving robot with a robot arm is a sub-class of robotic arms. They work just like other robotic arms, but the DOF of the vehicle is added to the DOF of the arm. If say you have a differential drive robot (2 DOF) with a robot arm (5 DOF) attached (see yellow robot below), that would give the robot arm a total sum of 7 DOF. What do you think the workspace on this type of robot would be

Motion Planning
In the image below the end effector of the robot arm is moving from the blue point to the red point. the end effector travels a straight line. This is the only possible motion this arm can perform to travel a straight line. In the bottom example, the arm is told to get to the red point as fast as possible. Given many different trajectories, the arm goes the method that allows the joints to rotate the fastest.
